






医疗器械结构与外观设计的相互联系
2021-01-22
上几期我们介绍了医疗器械的外观设计,这期讲述一下医疗器械的结构设计。
首先我们先来阐述一下结构设计与外观设计的一种相辅相成的关系。一个好看的产品,外观有至少50%是由结构设计决定的。医疗器械也好,工业产品也好,每一个物体都遵循这个规矩。就如同一个美女或者一个帅哥,脸蛋再好看,身材和脸蛋不协调,或者说没有一个完美的身材,只有一个完美的脸蛋,看起来总是给人很怪异的感觉。一个漂亮的医疗设备外观设计,绝不是一个漂亮协调的造型就可以完成的,也绝不是配好颜色就可以完成的,更不是将模型反复渲染就可以漂亮的。
所以医疗产品外观设计和结构设计并不是独立存在的,而是互相联系和影响,两者良好的配合才是一个产品设计得漂亮好看的基础,好产品历来都是多方配合的结果,这便也是一个相辅相成的关系。
再谈谈医疗器械结构的分类。按医疗器械的结构特征可分为无源医疗器械和有源医疗器械两大类。需要使用电、气等驱动的器械可称之为有源器械,比如各类医用电气类器械-X光机、心电监护设备等。无源产品本身不需要驱动源,比如心血管支架、手术刀、一次性使用注射器等都是属于无源医疗器械。
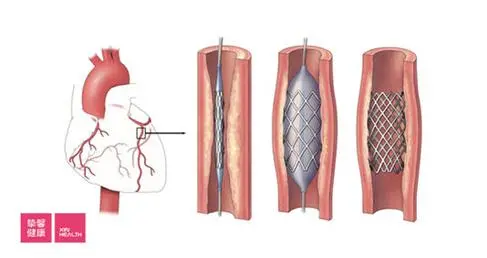 图1无源医疗器械 心血管支架
图1无源医疗器械 心血管支架
 图 2有源医疗器械 x光机
图 2有源医疗器械 x光机
最后我们聊聊关于医疗器械结构设计的原则。医疗器械结构设计中,人们需更多地考虑如何使产品尽可能做到外形美观、使用性能优良、成本低、可制造性、可装配性、维修简单、方便运输以及对环境有无不良影响等等。因此可以说,结构设计具有以下原则:
1. 合理划分产品结构的组件
2. 尽量多采用典型结构
3.力求系统和结构简单化
4. 合理选择基准、循行基准重合一致
5. 贯彻标准化、统一化原则
6. 结构应能进行调整与定位
一种新型四自由度的上肢康复机器人的设计
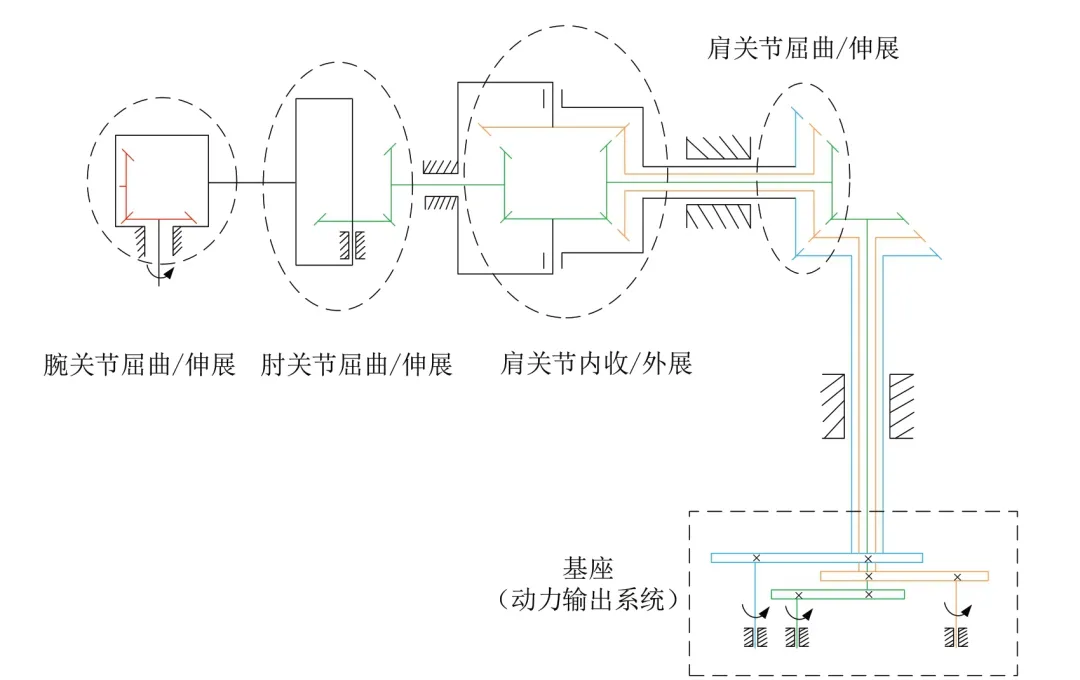 图3上肢康复机器人结构简图
图3上肢康复机器人结构简图
上肢康复机器人将三个驱动肩、肘关节运动的电机布置于同一基座,通过同步带传动系统将三个电机的动力源互不干扰地平行传出, 再通过主传动杆和弧齿锥齿轮等传动部件进行动力换向,最终将动力传输至肩、肘关节处,实现肩关节内收/外展功能及肩、肘关节屈曲/伸展功能。另外由于腕关节处的驱动电机较小,因此借鉴了外骨骼机器人将电机外置的优点,在机械臂末端设置微型动力系统实现腕关节屈曲/伸展功能,其机械结构简图如图3。
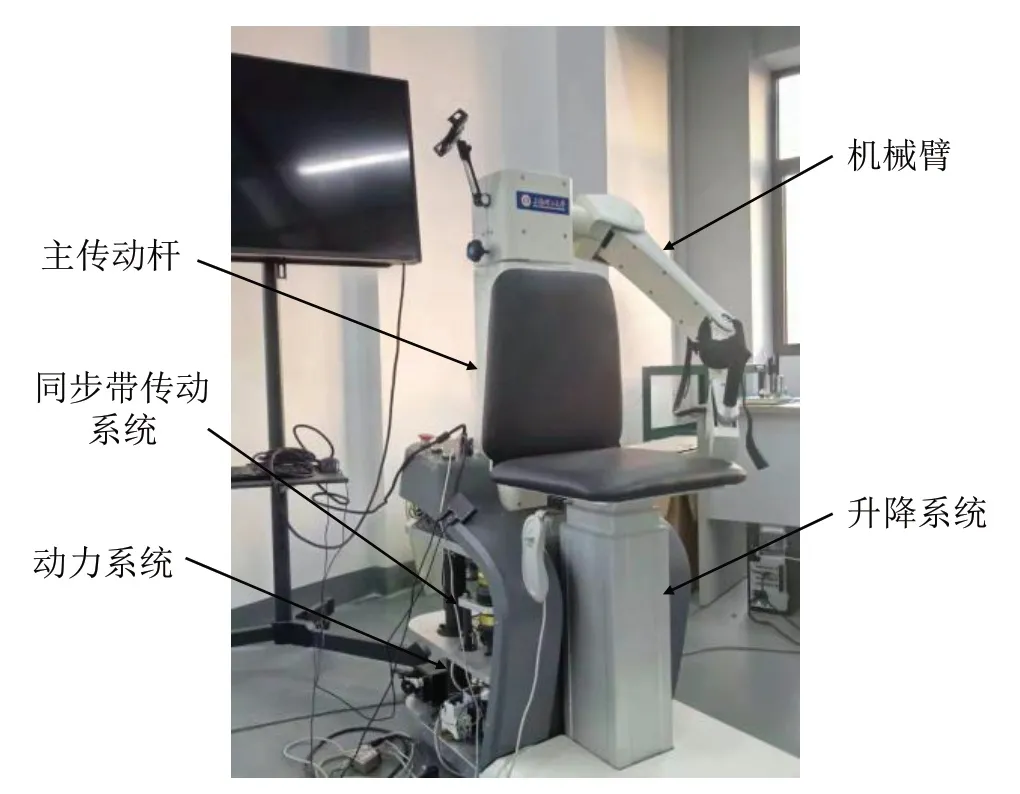 图4上肢机器人样机
图4上肢机器人样机
这样的设计使得机械臂的体积和质量大大减小,布局更加紧凑,而且有效克服了电机直接安装在这一种新型四自由度的上肢康复机器人的设计。
节处产生的巨大噪声和辐射等问题。同时由于锥齿轮可以通过旋转实现360°内任意角度的垂直传递,所以可以通过旋转机械臂来实现左/右手互换训练,从而提高上肢康复机器人的使用效率,其样机实物如图4。
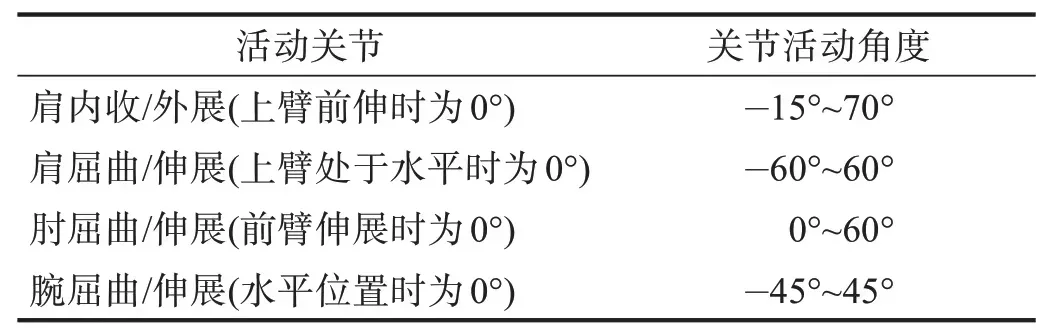 表1上肢康复机器人各自由度活动度
表1上肢康复机器人各自由度活动度
上肢康复机器人分别从机械、硬件和软件三个方面对安全性进行设计。首先,在机械结构上,机械臂四个关节处分别设有卡槽,每个关节的活动范围如表1。
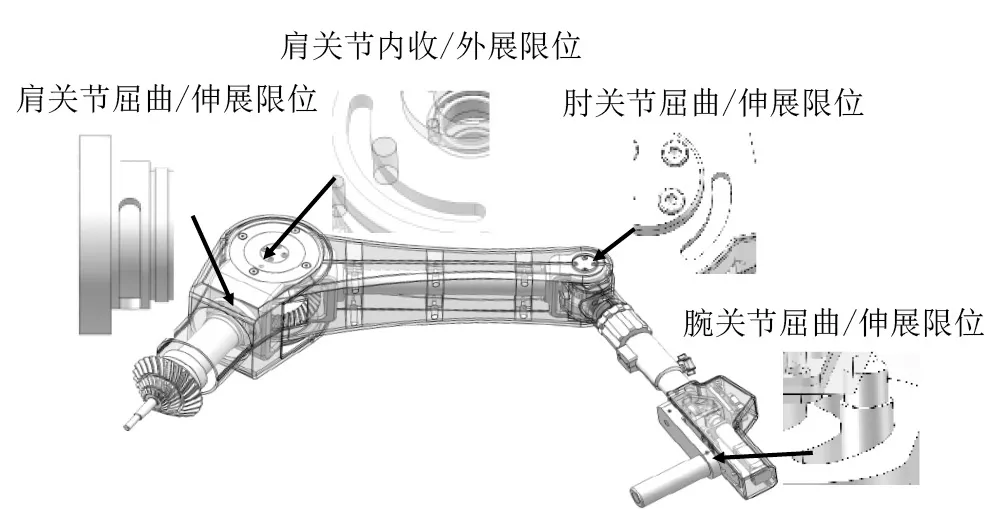 图 5机械臂各关节限位结构
图 5机械臂各关节限位结构
通过卡槽的形式将机械臂上肢的活动范围限制在安全的活动范围内,即在机械臂的极限位置设有限位,如图5。
其次,系统的上电和断电过程分别设计有独立按钮并引入急停开关,防止紧急情况下的误触发操作,同时对机体进行安全接地。软件上设有最大运行角度、速度检查和电流过流保护等功能,全方位保证患者的安全,如图6。
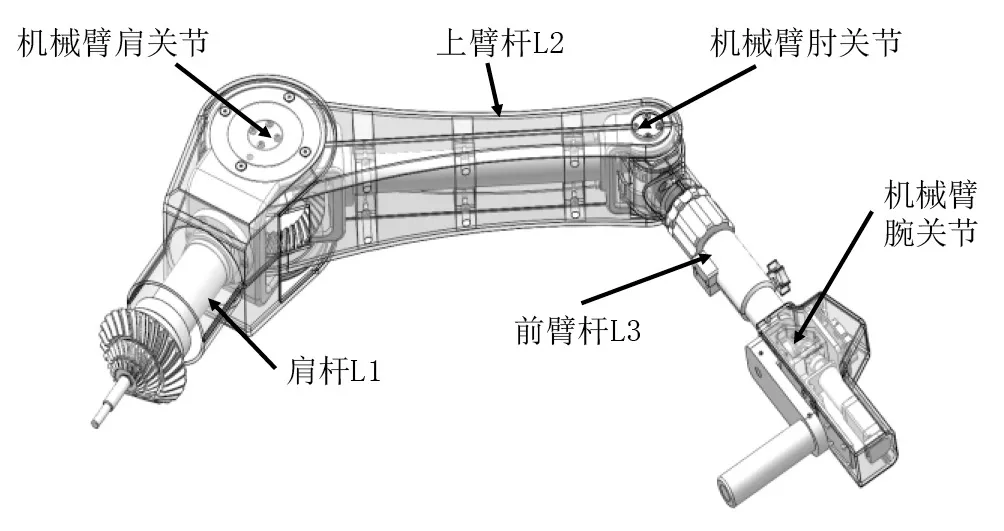 图6机械臂总体结构
图6机械臂总体结构
文章及图片来源:创客伯乐


